
ce montage a été réaliser pour palier a une vie manquante sue un modelé qui manquer une voie
principe :
sa marche sur une voie avec un inter 3 position :
- 0)déplacement d’une servo l’autre reste sur sa position
- 1) les 2 servo se déplace sur la position neutre
- 2)l’autre servo ce déplacement et l’autre reste sur sa position
pour régler les servos il y deux potentiomètre par servo un pour la position ” 1 ” et autre pour la position “0” ou “2” en fonction du servos
les potentiomètre de 18 et 17 sont pour la sorti 10
les potentiomètre de 1 et 7 sont pour la sorti 11
réalisation :
réaliser avec un picaxe 18m2 , 5 résistance et 4 potentiomètre :
| programme : |
| symbol varA = b0 symbol varB = b1 symbol varC = b2 symbol varD = b3 symbol varE = b4 symbol varF = b5 symbol varG = b6 symbol varH = b7 symbol varI = b8 symbol varJ = b9 symbol varK = b10 symbol varL = b11 symbol varM = b12 symbol varN = b13 symbol varO = b14 symbol varP = b15 symbol varQ = b16 symbol varR = b17 symbol varS = b18 symbol varT = b19 symbol varU = b20 symbol varV = b21 symbol varTEMPBYTE1 = b22 symbol varTEMPBYTE2 = b23 symbol varTEMPBYTE3 = b24 symbol varTEMPBYTE4 = b25 symbol varTEMPBYTE5 = b26 symbol varTEMPBYTE6 = b27 symbol varTEMPWORD1 = w11 symbol varTEMPWORD2 = w12 symbol varTEMPWORD3 = w13main:servo B.4, 101 servo B.5, 117 Cell_7_5: pulsin B.2, 1, varTEMPWORD1 varD = varTEMPWORD1 max 255 readadc C.1, varA readadc C.0, varB readadc C.2, varC readadc B.3, varE ;debug varF=varA varG=varC if varD < 147 then goto Cell_10_14 end if if varD > 156 then goto Cell_10_17 end if varF=varA varG=varC Cell_13_12: if varG > 225 then goto Cell_16_11 end if Cell_13_14: if varG < 75 then goto Cell_16_14 end if Cell_13_17: if varF > 225 then goto Cell_16_17 end if Cell_13_19: if varF = 80 then goto Cell_16_20 end if Cell_1_17: servopos B.4, varG varH=varG+2 varI=varG-2 servopos B.5, varF varj=varF+2 varK=varF-2 pause 500 goto Cell_7_5Cell_16_20: varF=80 goto Cell_1_17 Cell_16_17: varF=225goto Cell_13_19 Cell_16_14: Cell_16_11: Cell_10_17: varG=varE Cell_10_14: |
shema du circuit :
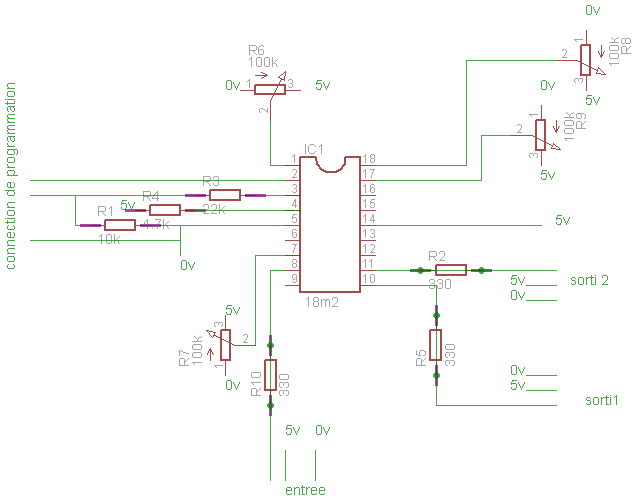
composant :
- r1 10k
- r3 22k
- r4 4.7k
- r2,r5,r10 330
- r6,r7,r8,r9 potentiomètre de 100k
- ic1 picaxe 18m2
- prevoir 3 connections pour connecte les servo en sorti et entre et aussi un pour le programmer
typon :
non réaliser